<cite id="e6aey"></cite>
地址:遼寧省大連市金州區(qū)普灣經(jīng)濟(jì)區(qū)三十里堡臨港工業(yè)區(qū)南8號(hào)路西側(cè)
座機(jī):0411-87353587轉(zhuǎn)8013
手機(jī):13842636257
郵箱:zhdtpu@huston.cn
版權(quán)所有 Copyright(C)2015-2024 大連中海達(dá)科技有限公司
<small id="u0eac"></small>

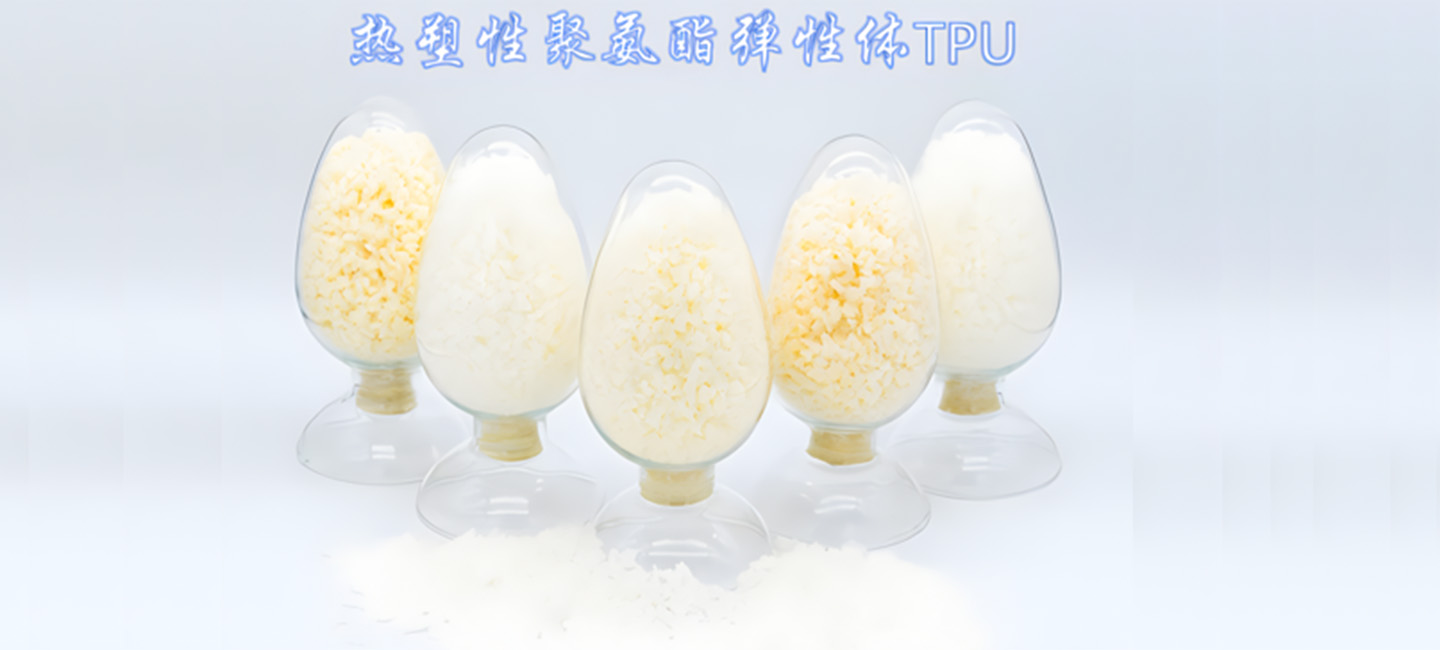
頁(yè)(1).jpg "banner")